系统:Ubuntu 18.04
安装ROS版本:melodic

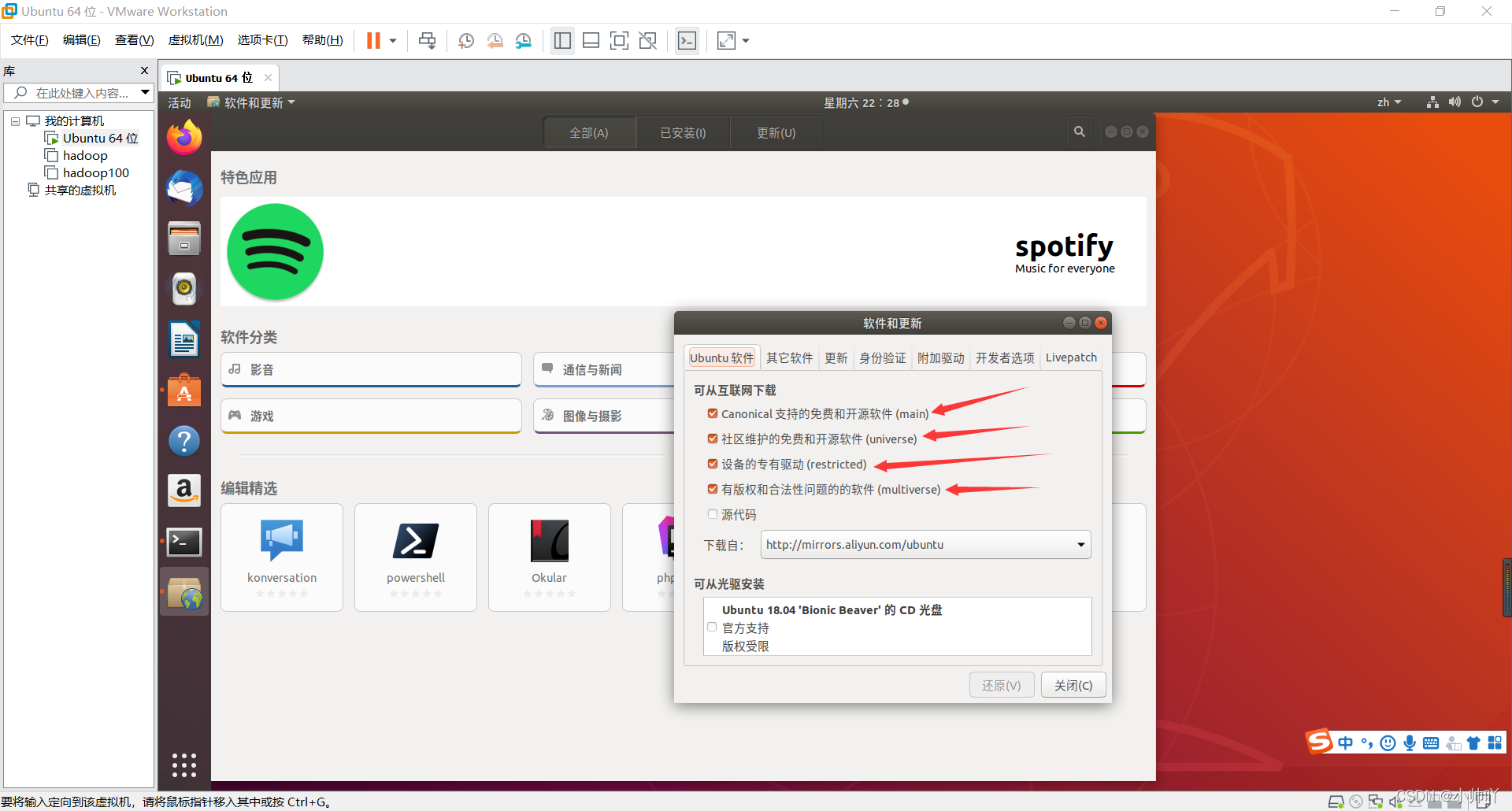
前四个勾选
打开命令终端,输入以下命令
1.添加ROS源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'2.添加秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543.安装ROS
sudo apt-get update如果部分不成功更换电脑连接手机热点试试,本人第一次安装就成功了。
sudo apt-get install ros-melodic-desktop-full大概需要两个多G,输入Y进行安装
4.安装并初始化rosdep
wget http://fishros.com/install -O fishros && . fishros
### 上行代码运行后根据提示输入4
### 输入回车
# 根据提示rosdep初始化
rosdepc update
#更新ros源5.设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrcsource ~/.bashrc至此,环境已经安装完了,开始测试~
6.启动运行小海龟例子
1.第一个终端运行如下命令
roscore2.打开第二个终端,也可以利用 Ctrl+Shift+T 快捷键打开一个新的终端,运行如下命令,这时你会看见一只静止的小海龟
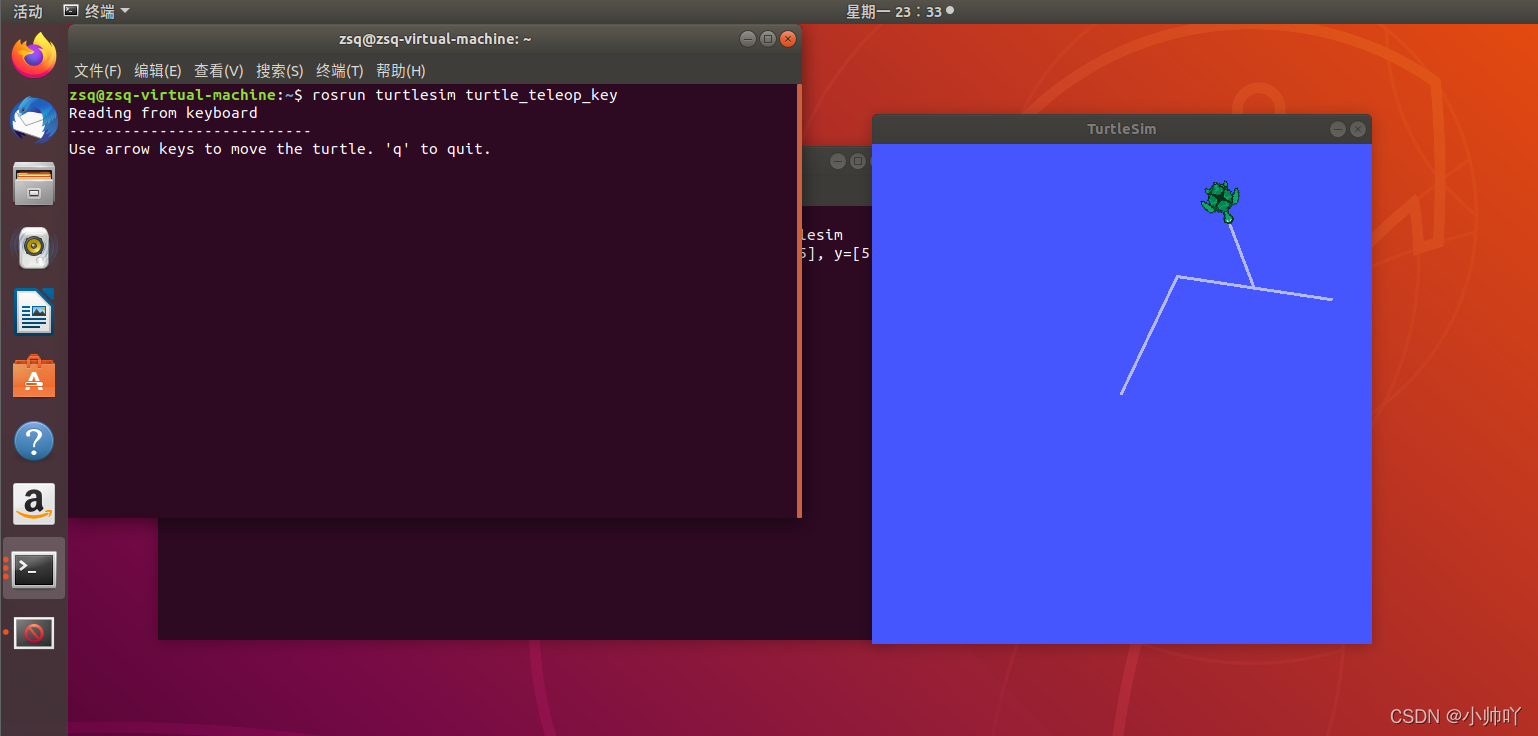
rosrun turtlesim turtlesim_node3.如果希望小海龟能够移动,打开第三个终端,或者利用Ctrl+Shift+T快捷键再打开一个新的终端,启动turtlesim的键盘控制节点turtle_teleop_key,运行如下命令
rosrun turtlesim turtle_teleop_key(这里你的鼠标要停留在当前这个终端界面,按键盘上面的 上下左右 来控制小海龟的移动)
键盘上面的“上下左右” 小海龟移动情况
上 前进
下 后退
左 原地向左转
右 原地向右转